


La automatización robótica tuvo una gran presencia en la feria JIMTOF de Tokio, Japón. Este FANUC M-2000iA, que manipula una sección de fuselaje de un aeroplano, sería el robot articulado de seis ejes más grande del mundo. La capacidad de carga útil es de 5,070 libras.

Fabricantes de máquinas-herramienta tales como DMG MORI…

…y Makino ofrecieron vehículos guiados automatizados (AGVs) equipados con robots colaborativos. Los AGVs facilitan el redespliegue de los robots, transportándolos de forma segura y autónoma de un equipo a otro.

Ahora se están desarrollando efectores finales diseñados específicamente para usar con robots colaborativos. Por ejemplo, la pinza Co-act de Schunk, con exterior suave de caucho, ofrece una fuerza de agarre limitada y no tiene puntos punzantes para no causar lesiones a los empleados que trabajan cerca.

La tecnología Armroid de Okuma es un caso extremo de una integración simple de robot. En JIMTOF, se mostró integrada directamente en el área de trabajo de un centro de torneado. Los efectores finales almacenados en el área de trabajo pueden intercambiarse para dar flexibilidad en el cambio de un trabajo a otro.

Con sólo ingresar un nuevo valor de diámetro es posible que el robot FANUC, que atiende este centro de torneado Mazak, sujete una nueva pieza de trabajo.

Una cuarta capacidad de robots que los talleres pueden dar por cumplida es la fácil automatización de la medición de parte. Como se muestra aquí con este robot Yaskawa, la atención de una CMM puede aliviar un potencial cuello de botella del departamento de calidad, cuando muchas partes mecanizadas de forma desatendida en la noche requieren inspección a la mañana siguiente.



La robótica ha avanzado al punto en que las expectativas de los talleres de máquinas CNC pueden superar las preguntas sobre las aplicaciones prácticas. De hecho, muchos talleres exitosos ya se han beneficiado de robots que atienden máquinas o han investigado varias ofertas de robots pensando en unirlos a sus procesos.
Las ventas globales de robots corroboran esta idea. Según el Reporte Mundial de Robótica de 2018 de la International Federation of Robotics, un número récord de 381,000 robots fueron enviados alrededor del mundo en 2017, un incremento del 30 por ciento comparado con 2016. Para 2018, ese número se espera incrementar en un 10 por ciento hasta 421,000 robots.



La maduración del mercado de los robots de manufactura llega en un tiempo oportuno tanto para talleres grandes como pequeños. La falta de mano de obra capacitada y la dificultad de atraer gente joven a este campo hace atractiva la atención automatizada de máquinas, especialmente para talleres que buscan incrementar la utilización de husillo y operar de manera desatendida durante la noche. Los robots también pueden ayudar a atraer nuevas contrataciones de personas que no se limitan a cargar y descargar máquinas durante todo el turno.
Los robots fueron particularmente notables en la Feria Internacional de Máquinas-Herramienta de Japón (JIMTOF) el pasado noviembre, la cual fue la edición 29 de la exhibición bienal organizada por la Asociación de Fabricantes de Máquinas-Herramienta de Japón y que tuvo lugar en el centro de convenciones Tokyo Big Sight. Al igual que en el International Manufacturing Technology Show (IMTS) el pasado mes de septiembre en Chicago, Illinois, la JIMTOF 2018 batió récords previos de visitantes (más de 153,000 este año) y número de expositores (1,085). El interés de la industria en exposiciones como estas ciertamente no está disminuyendo, ya que los fabricantes continúan visitándolas para aprender cómo las estrategias de talleres, como la automatización, pueden incrementar la eficiencia de sus negocios e impulsar el crecimiento.
Expectativas, ejemplos de evolución
Aquí se presentan tres expectativas que creo que los talleres tienen sobre los robots. Estos puntos se ilustran con ejemplos que vi en la exposición de cómo la tecnología ha evolucionado con respecto a cada expectativa:
1. Los robots deberían ser capaces de operar de forma segura al lado de las personas.
Los fabricantes continúan necesitando robots convencionales con protecciones de seguridad para evitar que la gente ingrese al área de trabajo de los robots, especialmente cuando las aplicaciones piden alta velocidad o capacidad de carga útil. Sin embargo, en JIMTOF hubo muchos (si no más) robots colaborativos o “cobots” en exhibición.
Los cobots usan tecnología de detección para evitar lastimar a las personas en una misma área de trabajo. En algunos casos, los sensores se integran en el robot mismo para detener su movimiento cuando inesperadamente hace contacto con un objeto o una persona. Otra aplicación usa sensores para disminuir o parar el movimiento del robot, según sea la proximidad de una persona al área de trabajo.
Cuando los cobots eran nuevos en la escena de la automatización, los estándares ISO 10218 existentes sobre requerimientos de seguridad de robots industriales (publicada en 2011) no atendían adecuadamente su integración segura en unas instalaciones de manufactura. Esto motivó a la comunidad de automatización a desarrollar la especificación técnica ISO/TS 15066. Un aspecto importante de esto es que da guía a los integradores de robots y al personal de manufactura sobre cómo adelantar evaluaciones de riesgo preliminares más sofisticadas, tanto del cobot como del ambiente que compartirá con los humanos.
Otra señal de que el interés en el cobot está incrementando es el desarrollo de efectores finales diseñados específicamente para ellos. Un ejemplo en la exhibición fue la pinza Co-act de Schunk, la cual ofrece una cubierta suave y carece de esquinas agudas y puntos punzantes. La fuerza de agarre también es menor a 140 Newtons (según ISO/TS 15066) para evitar lesiones.
2. Los robots deberían ser capaces de ser redesplegados a múltiples máquinas en una instalación.
Los talleres de trabajos o subcontratación que mecanizan una alta mezcla de partes en bajos volúmenes pueden beneficiarse de la carga robótica, así como pueden hacerlo las operaciones de alta producción. Las unidades de carga móviles y auto-contenidas con robots o sistemas de recolección de partes pueden facilitar esto. Una vez el trabajo se completa en una máquina, la unidad puede moverse fácilmente a otra con un gato de palets o un elevador. Unos niveladores alinean estas unidades con la máquina. Algunas unidades trabajan con varios controles de máquinas-herramienta y no requieren que el fabricante de máquinas-herramienta suministre una interfaz de robot especial. En cambio, un controlador lógico programable (PLC) es todo lo que se necesita para conectar la máquina y el cargador.
En JIMTOF, unos pocos fabricantes de máquinas-herramienta llevaron esto un paso más allá al integrar cobots con vehículos guiados automatizados (AGVs) que pueden moverse autónomamente de máquina a máquina. Los AGVs usan tecnología de detección para guiarlos con seguridad a través de una instalación sin golpear equipos o personas mientras se redespliegan a otro equipo.
3. Los robots deberían ser fáciles de integrar.
El ejemplo arriba describe cuán fácil puede ser integrar un robot con una máquina-herramienta. Sin embargo, estos casos se demostraron más claramente en los stands de fabricantes de máquinas-herramienta sin ningún robot en exhibición. El mensaje no es que los robots no sean importantes o valiosos, sino que la integración es tan fácil que los fabricantes de máquinas-herramienta no consideran que los robots sean una parte necesaria de un stand de una feria.
Dicho esto, algunas máquinas-herramienta tienen automatización robótica incorporada, de modo que un integrador no es necesario. Por ejemplo, Murata mostró unos tornos con plato de doble husillo y cargadores gantry integrados. De hecho, la compañía ahora ofrece cargadores gantry de fibra de carbono que se moverán hasta 50 por ciento más rápido que los cargadores estándar.
Además, Okuma introdujo el torno CNC LB3000 EX con Armroid, un cargador de robot articulado que se monta en el área de trabajo de la máquina para carga/descarga de partes. El sistema operativo del robot no requiere aprendizaje durante nuevos alistamientos de trabajo, y puede realizar movimientos sin colisiones mientras se realiza el mecanizado de una parte. El robot puede almacenar tres efectores finales diferentes y cambiarlos según sea necesario de acuerdo con la aplicación. Como en el ejemplo anterior, integrar el robot en la máquina conserva espacio en el piso.
Automatización de la transferencia de datos
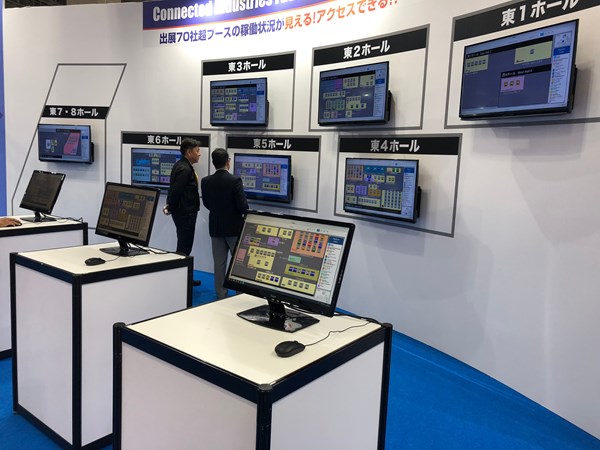
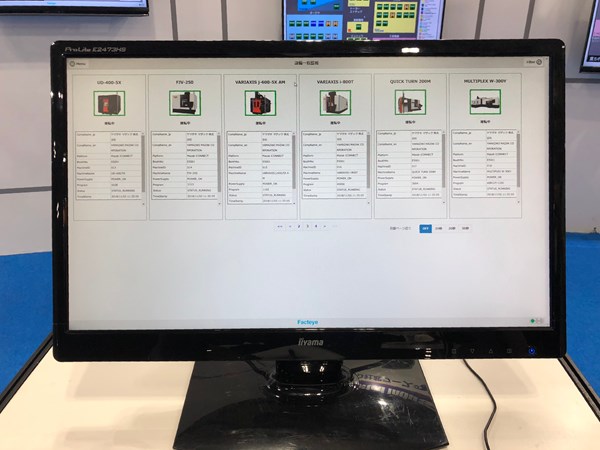
JIMTOF ofreció automatización más allá de los robots. El ejemplo más significativo fue la transferencia automática de datos entre casi 300 piezas de equipo en el piso de exhibición. Máquinas-herramienta, robots, dispositivos de inspección y otros equipos de 72 expositores estaban conectados a través del sistema de IIoT Field de FANUC para formar una “fábrica conectada” de diferentes clases en las instalaciones de la feria. Los monitores en esta área mostraban la condición de las máquinas a lo largo de los ocho pabellones de la feria.






Contenido relacionado

Festo invertirá 100 millones de dólares en Nuevo León
Festo indicó que la planta estará lista en 2025.
Leer Más
Cinco tendencias en robots industriales para 2023
Las tendencias identificadas por la IFR para la robótica y la automatización en 2023 se enfocan en mejorar la competitividad y sustentabilidad de las empresas, reducir costos y optimizar la producción.
Leer Más
TIMTOS 2023: "Taiwán ha dado un paso adelante"
Con la presencia de la presidente de Taiwán, Ing-Wen Tsai, arrancó TIMTOS 2023 con más de 1,000 expositores de 18 países.
Leer Más
Récord de robots instalados en la industria automotriz
Con un millón de robots industriales operando en plantas automotrices, estos equipos están contribuyendo a la transición energética del sector automotor y optimizando procesos de producción. Datos clave de la Federación Internacional de Robótica (IFR).
Leer MásLea a continuación

Sistema de sujeción permite a un taller alcanzar las tolerancias requeridas
Este taller de Monterrey, dedicado a la manufactura de ejes para motorreductores, no conseguía alcanzar las tolerancias exigidas por su cliente. El uso de un collet chuck le permitió lograr las dimensiones requeridas y reducir los tiempos del proceso en 54 %.
Leer Más
Consideraciones para comprar un torno CNC
Los tornos CNC son una de las tecnologías de mecanizado más antiguas; sin embargo, sigue siendo útil recordar los aspectos básicos a la hora de considerar comprar una máquina de este tipo.
Leer Más
¿Por qué usar torno-fresado?
Los fabricantes de máquinas-herramienta se dieron cuenta de que las piezas torneadas a menudo requerían también, al menos, algún trabajo de fresado o taladrado. Por ello aumentaron las capacidades de los tornos mediante husillos adicionales para el trabajo con herramientas giratorias. De esa manera surgieron las máquinas de torno-fresado.
Leer Más